
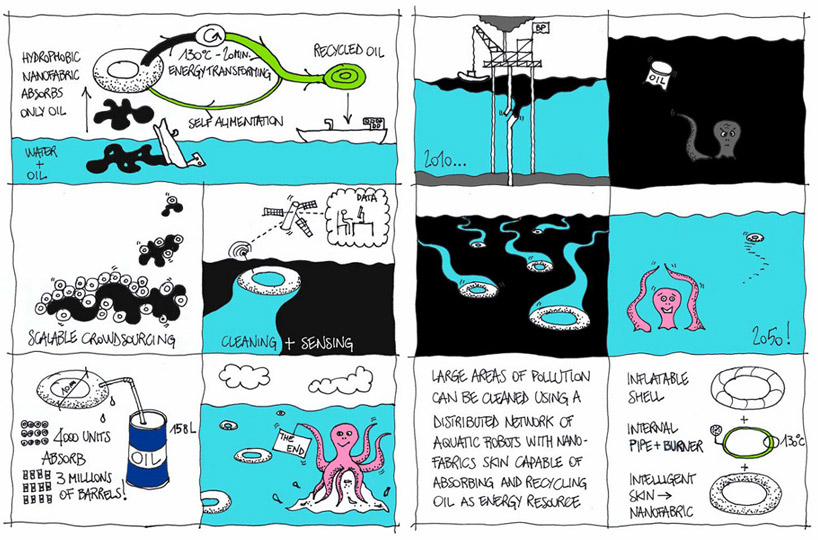
the deepwater horizon oil spill in the gulf of mexico is said to have leaked 4.9 million barrels of crude oil. while the leak
is now capped, the clean-up is still occurring. researchers in MITs senseable city project developed seaswarm,
an autonomous network of solar-powered oil cleaning robots to handle situations just like this. the small floating devices,
skim the waters surface, collecting oil on a conveyor belt made of a thin nanowire mesh. this patented nanomaterial can
absorb up to 20 times its weight in oil. the oil is then digested onboard the seaswarm so that the robot can be continually
collecting. the devices communicate with each other through GPS and wifi tackling an oil spill from the edge and working
inwards. their small size allows them to reach areas where other oil collectors cannot navigate.
http://senseable.mit.edu/seaswarm





No comments:
Post a Comment